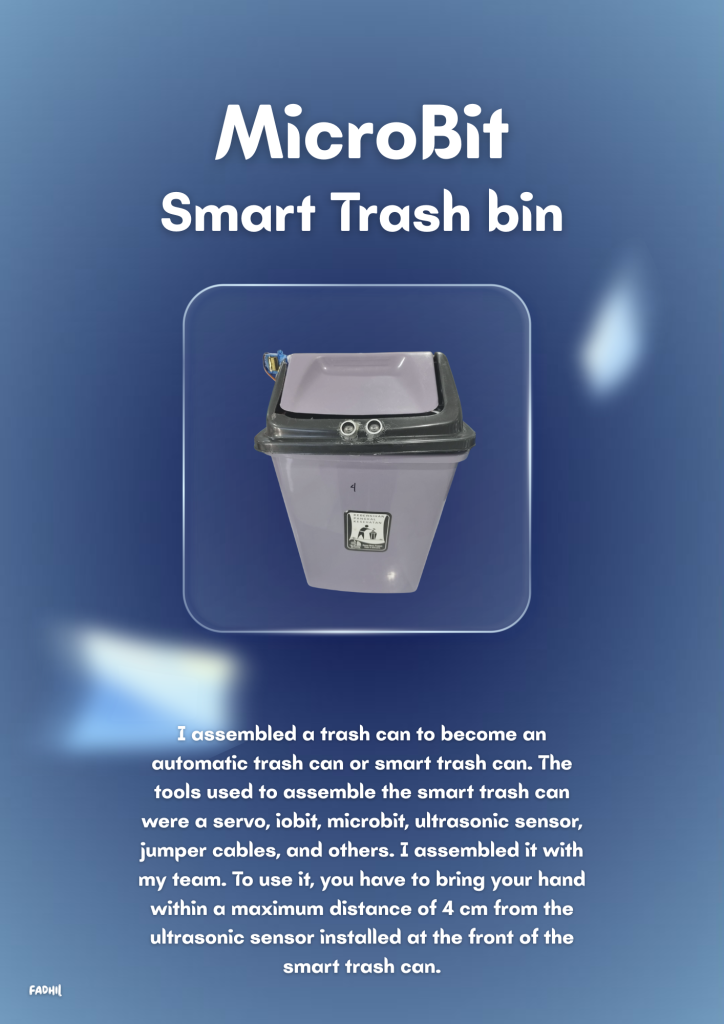
So, in this project in second semester, I assembled a trash can to become an automatic trash can or smart trash can. The tools used to assemble the smart trash can were a servo, iobit, microbit, ultrasonic sensor, jumper cables, and others. I assembled it with my team. To use it, you have to bring your hand within a maximum distance of 4 cm from the ultrasonic sensor installed at the front of the smart trash can. After that, the smart trash can will open for 5 seconds. After placing the trash inside, you must close the smart trash can with your hand as if you were opening it.